With the rapid development of science and technology, hotel robots are gradually becoming a tool to improve customer experience and operational efficiency. In the hotel environment, robots need to navigate autonomously in complex and changing environments, which puts extreme demands on their path planning and positioning technology. This paper will deeply analyze the core of hotel robot navigation technology, SLAM (Simultaneous localization and map Construction) algorithm and its path planning method.

What is SLAM algorithm?
SLAM (Simultaneous Localization and Mapping) is a technique that enables a robot to simultaneously build a map and position itself in an unknown environment. The core task of the SLAM algorithm is to update a map of the environment in real time through sensor data (such as lidar, cameras, ultrasonic sensors, etc.) and determine the location of the robot in that map.
Key components of SLAM algorithm
1.Sensor data acquisition
LiDAR: By firing laser light and receiving reflected signals, Lidar can accurately measure the distance and position of surrounding objects, building a high-precision map of the environment.
Camera: Vision sensors capture images of the environment and use computer vision technology for feature extraction and matching to assist map construction and positioning.
Inertial Measurement Unit (IMU) : IMU sensors provide acceleration and angular velocity information for robot attitude estimation and motion tracking.
2.Environmental feature extraction
Feature point detection: The algorithm detects key feature points in the environment, such as corner points, edges, etc., as the basis for map construction.
Feature matching: The newly acquired feature points are matched with the feature points in the existing map to determine the position of the robot in the map.
3.Map construction
Raster map: Divide the environment into fixed size grids, each recording whether it is occupied by obstacles, to build a two-dimensional or three-dimensional map.
Feature map: A map built based on the location and attributes of feature points, suitable for navigation in a large range of complex environments.
4.Positioning and updating
Particle filtering: The possible position of the robot is represented by a large number of particles, and the particle weight is updated by sensor data to finally determine the position of the robot.
Extended Kalman Filter (EKF) : Uses sensor data and motion models to recursively update the robot’s location and map.
Path planning technique
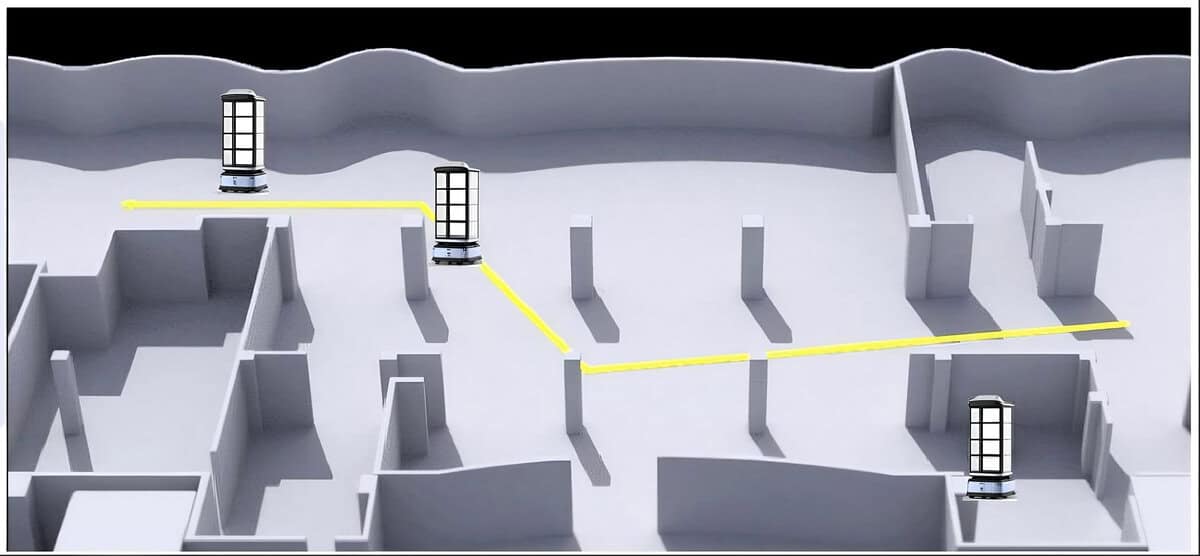
After completing the map construction and localization of SLAM algorithm, the robot needs to carry out path planning in order to reach the target position efficiently and safely. Path planning techniques mainly include the following:
1.Global path planning
A* algorithm: A classical search algorithm that finds the shortest path by estimating the cost of the current node to the destination node. A* algorithms perform well in static environments, but require frequent updates in dynamic environments.
Dijkstra algorithm: A search algorithm that finds the shortest path from the starting point to the target point by gradually expanding the nodes.
2.Partial path planning
Dynamic window method (DWA) : Based on the robot’s motion model and environmental obstacle information, the safe path is calculated in real time, which is suitable for obstacle avoidance and navigation in dynamic environment.
Artificial potential field method: the target point is regarded as the source of attraction, the obstacle is regarded as the source of repulsive force, and the resultant force direction is calculated to guide the robot forward. This method is simple and intuitive, but local optimal solutions may occur in complex environments.
3.Mixed path planning
The global path planning and partial path planning are combined to determine the approximate path through partial planning, and then adjust it in real time through local planning to adapt to changes in the dynamic environment.
SLAM algorithm and path planning technology are the core of hotel robot autonomous navigation. Through efficient environment awareness, precise positioning and intelligent path planning, hotel robots are able to provide high-quality service in complex and changing environments. With the continuous advancement of technology, hotel robots will become more and more intelligent, bringing more innovation and change to the hotel industry.